































14156-1-300x300.jpg)
14156-2-300x300.jpg)




Address: 2-1 Bantian Street Longgang District 518129, Shenzhen City, China.
Phone: (+86) 185 6568 7696
Customization Inquiries: sales@casterbot.com


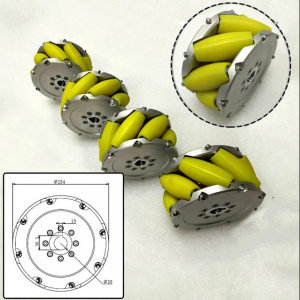
Discover the wide range of Heavy Duty Industrial Mecanum Wheels , Industrial Mecanum Wheels, Nexus Mecanum Wheels at CasterBot store. We are the most trusted supplier of Mecanum wheels and Mecanum wheels.
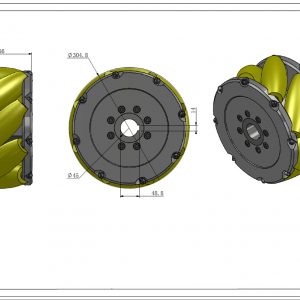
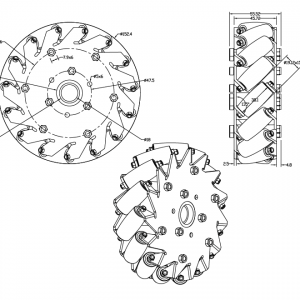
The Mecanum wheels are a design for a wheel that can move a vehicle in any direction. It is a conventional wheel with a series of rollers attached to its circumference. These rollers typically each have an axis of rotation at 45° to the plane of the wheel and at 45° to a line through the center of the roller parallel to the axis of rotation of the wheel. A typical configuration is the four-wheeled one of the URANUS Omni-directional mobile robot or a wheelchair with Mecanum wheels. By alternating wheels with left and right-handed rollers, in such a way that each wheel applies force roughly at right angles to the wheelbase diagonal the wheel is on, the vehicle is stable and can be made to move in any direction and turn by varying the speed and direction of rotation of each wheel. Moving all four wheels in the same direction causes forward or backward movement, running the wheels on one side in the opposite direction to those on the other side causes rotation of the vehicle, and running the wheels on one diagonal in the opposite direction to those on the other diagonal causes sideways movement. Combinations of these wheel motions allow for vehicle motion in any direction with any vehicle rotation (including no rotation at all).
Tracked vehicles and skid steer vehicles utilize similar methods for turning. However, these vehicles typically drag across the ground while turning and may do considerable damage to a soft or fragile surface.
The high friction against the ground while turning also requires high-torque engines to overcome the friction. By comparison, the design of the Mecanum wheel allows for in-place rotation with minimal ground friction and low torque.




Address: 2-1 Bantian Street Longgang District 518129, Shenzhen City, China.
Phone: (+86) 185 6568 7696
Customization Inquiries: sales@casterbot.com
![]()
![]()

![]()






Copyright © 2019 CasterBot Technology Ltd